
AIでドライバー安全プログラムを改善できるのか?
自動運転の完全な実現までにはまだ数十年かかるかもしれませんが、安全運転のテクノロジー企業ではすでにAIの導入が始まっています。AIの実装例は、エッジ(この場合は自動車)やクラウド、またエッジとクラウドの双方向など、多岐にわたります。このようなドライバーと車両の安全を守るAIソフトウェアを正しく評価するにはどうすればよいか、順を追って見ていきましょう。
ドライバーの行動を確実に改善し、衝突事故による損失を減らすには、適切なソリューションの選択が重要です。代表的な評価基準を以下にご紹介します。
- そのAIモデルは熟練ドライバー並に衝突事故のリスクを識別できるか?課題
車両の増加やドライバーの入れ替わりが激しさを増す中、同乗研修や個別研修をこれまで通り実施するのは難しくなってきています。そんな中でも、車両運行管理者/安全管理者が、ドライバーを指導し、熟練ドライバー並の安全な運転をできるようにするにはどうすればいいでしょうか?求められる技術: マルチタスク型畳み込みニューラルネットワーク(CNN)と複数のセンサーのよる複合的なデータ分析
AIによるドライバーサポートには、人間の指導者と同じようにドライバーの行動を識別し、介入できることが必要です。
- そのAIモデルは現実世界ででうまく機能するか?課題
AIが人間のコーチと同じように、ドライバーの行動、周囲の情報、車両の挙動におけるリスクを認識できるようになったら、次はさまざまな運転状況の中で同じ行動を認識できるように学習させる必要があります。ドライバーの外見、服装、車内の広さ、照明条件、道路状況、交通パターンなどの要素がこれに含まれます。求められる技術: CNNモデルの継続的な学習
人間の目や脳と同様に、AIも常に新しい実際の運転データを使った訓練を継続しなければ、このような多様な状況で活用できるようにはならないでしょう。
- ドライバーの行動に最も効果的に影響を与えるには、AIモデルをどのように展開すればよいか?課題
最終的にAIの理解力がドライバーの行動、周囲の情報、車両の挙動や運転状況全体における重大なコンテキストデータに対して、信頼できるレベルに達したとしても、最も必要な場面でドライバーをサポートできるように車両へ展開されていないと、うまく機能しません。求められる技術: エッジツークラウドのソフトウェアアーキテクチャ
エッジコンピューティングや高速モバイルネットワーク通信によるIoT技術が発達したおかげで、車両へAIを展開して、高リスクのイベントが検出されるとすぐにドライバーにアラートを発報し、衝突事故を予防・回避することができるようになりました。

ディープラーニングによるニューラルネットワーク構築
ドライバーや車両の安全を守る適切で強力なAIソフトウェアを作るには、まずディープラーニングを用いたニューラルネットワークを開発する必要があります。これは、人間の脳のような正確性と計算速度を備えたパターン認識を、効率的かつ自動的に行うアルゴリズムです。
ディープラーニングシステムに多くの時間や資金を投資したうえで、高品質の映像と専門知識を活用しなければ、複雑な運転状況の中でパターンと傾向を認識することはできません。
ナウトは創業以来ニューラルネットワーク科学をその技術に取り入れ、以下のようなさまざまな交通情報のインプットを用いてパターン認識を行っています。
- ドライバーの行動: わき見運転、眠気、疲労、携帯電話の使用、食事などのリスクの高い行動(照明条件、車種、ドライバーの外見・服装にかかわらず認識可能)
- 周囲の情報: 先行車の位置や速度、停止標識の有無や信号機の状態、歩行者、自転車などの車両や交通の状況
- 車両の挙動: 急加速、急ブレーキ、急ハンドル、スピード違反などの危険な運転を含む挙動
- コンテキストデータ: ドライバーの反応速度、天候、交通パターン、衝突事故履歴など、日々蓄積される実際の交通データからの継続的な学習
マルチタスク型畳み込みニューラルネットワーク (CNN)
多くのAIソリューションがディープラーニングを用いたニューラルネットワークの使用を謳っていますが、より高度に進化したのがマルチタスク型畳み込みニューラルネットワーク (CNN)です。ドライバーの行動や交通パターンの分析を行うアルゴリズムができたら、マルチタスク型の畳み込みを実現するために、ニューラルネットワークで作成した既存のモデルをより進化させる必要があります。 CNNはニューラルネットワーク科学の中でも専門的な分野ですが、簡単に言えば、これを利用すると映像を解析して、車内や前方の道路、そして車両自体に何が起きているのかを、車内にいるドライバーそして、クラウド上の車両安全管理ソフトウェアに伝達することが可能になります。
車内のイメージセンサーを例にとると、CNNモデルでは映像を解析して、以下のようなドライバーのわき見行動を判別・特定することができます。
- わき見運転、眠気
- 携帯電話の使用
- 喫煙
- シートベルトの着用不備
- その他多数の行動
CNNモデルでは、ディープラーニングによるニューラルネットワークのパターン認識に基づいて映像を解析して、リスクレベルを推測します。
マルチセンサーデータフュージョンを活用したCNN
ひとつの映像に対してパターン認識に基づいた解釈を行い、判定結果が導き出せるようになったら、CNNモデルの層を増やし複数のセンサーのインプットを同時に処理できるようにするのが自然な流れです。CNNモデルには、ドライバーの行動、周囲の情報、車両の挙動などの複数の映像を融合させ、リスクをより包括的に理解できる高度な知能が求められています。この技術を利用すれば、人間の頭脳よりも的確かつ迅速なリスクの推測が可能です。
現在ナウトでは、ドライバーの行動、交通状況、車両の挙動、重要なコンテキストデータをCNNモデルの下に融合させ、隠れた衝突の危険回避を目的とした衝突事故予測アラート(ニアミスアラート)と、リアルタイムに車内でのコーチングを行うリアルタイムアラートにおいて、状況の重大度を判定するためにCNNを利用しています。 例えば、わき見運転を防止するナウトのドライバー行動アラートは革新的な音声アラートですが、わき見の時間(ドライバーの行動評価)と車速(車両の挙動評価)に基づいて発報されます。また、安全運転管理者や運行管理者向けに完全なコンテキストデータを提供し、ドライバーのセルフコーチングや管理者による個別研修に役立てることができます。
CNNモデルのトレーニング
高精度で強力なパターン認識能力を備えたAIベースのソリューションを開発するには、多様性に富んだ実際のデータと、特別なクラス分類を用いてCNNモデルをトレーニングし継続的な学習と改善を可能にすることが不可欠です。
ラベル付けされた学習データを基にするだけのCNNモデルは、数学を学ぶ生徒と同じで、教師よりも優秀になることはありません。CNNモデルに高リスクイベントの識別と予測を効果的に学習させるために、ナウトでは独自の分析ワークフローを採用し、以下のような複雑な実際のシチュエーションの分析や、高リスクな運転イベントの予測因子の特定を行っています。
- ドライバーのさまざまな外見と服装(顔の形、サングラス、マスク、帽子など)
- 車内の広さ(乗用車から大型トラックまで)
- 時刻(朝、夜、その他の照明条件など)
- 天候条件(雨、曇りなど)
- 道路の種類
- その他
CNNモデルの開発において、このような大きくばらついた要素を考慮しながらも高い精度が得られているのは、世界中のナウトのお客様車両から得られた多様で高品質な大量のドライバー行動データに支えられているからです。 ナウトでは今も増え続けているAIが解析した14億キロ分の走行映像を用いて、実際の複雑な運転状況にみられるような変動要素を踏まえたCNNモデルのトレーニング、構築を続けています。
エッジツークラウドソフトウェアの実装
ハードウェアリソースを最大限に活用するには、AIベースのドライバー安全管理ソリューションをエッジとクラウド双方で実装し、それぞれの長所が最大限活かされるようにする必要があります。
継続的な学習: ナウトは、高精度なCNNモデルを効率的にトレーニングするために、アクティブラーニングプロセスを活用して、エッジから価値の高い重要なデータを見つけ出し、CNNモデル開発サイクルに投入しています。
車載機上でのエッジAI処理: ドライバーの安全や命を守るためには、一刻が争われます。衝突事故の防止は、まず車両内から始められます。ナウトのソフトウェアがエッジである車両内で実行されるのはそのためです。
従来のようなクラウド処理にのみ依存したAIソリューションとは異なり、ナウトのエッジ処理は検出されたリスクに対して即座に応答するため、衝突事故予測アラートとドライバー行動アラートによってリアルタイムに衝突事故を防ぐことができます。
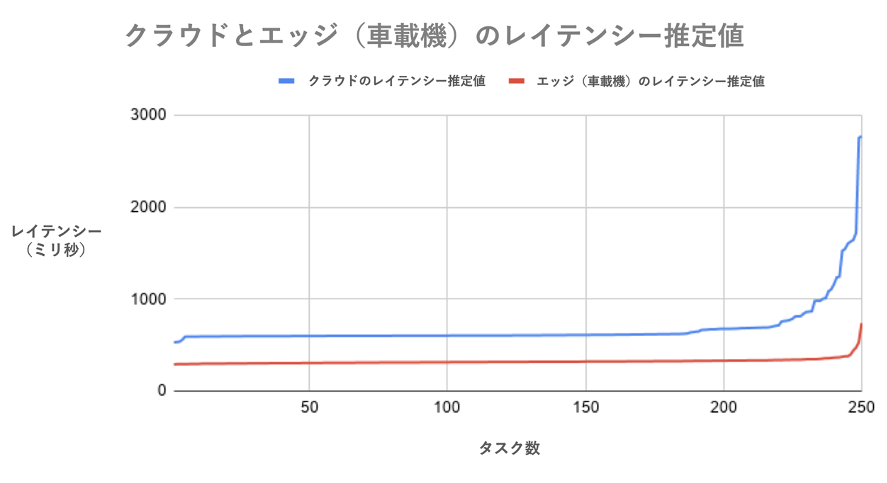
エッジ(車載機)およびクラウドにおけるレイテンシー推定値の比較
クラウド上でのデータの処理はエッジでの処理として3倍の時間がかかります。
拡張性のあるクラウド基盤: エッジAI処理はリアルタイムの衝突事故回避システムに特化していますが、ナウトのクラウドネイティブのソフトウェアはモデル改善のための開発サイクルを高速化することができ、高い可用性や拡張性、信頼性を実現できる点で優れています。
エッジ(車載機)へCNNモデルを展開する前に、ナウトはクラウド上に新しい危険挙動の検出や機能の拡張を行います。クラウド上にはAIが解析した14億キロ分以上の運転中の映像からの数百万のデータ要素が保管されており、綿密に処理された上で、ドライバーの安全向上のために最適化が行われています。ナウトでは、クラウド上ですべての新規および既存のCNNモデルの入出力を検証し、新しい機能がある一定の精度水準に達するまで改良を行います。その後に通信回線を使い車載機に展開することで、車内のドライバーの行動をリアルタイムで改善させます。
まとめ
昨今ではAI搭載を謳ったドライブレコーダーや安全管理システムが販売されていますが、今お使いのシステムは取得された複合的なデータの分析やマルチタスク型畳み込みニューラルネットワーク(CNN)による継続的な学習、エッジからクラウドへの効果的な情報連携はできる製品でしょうか?こういった機能がない場合、現代の複雑な運転環境において、実際にその高リスクイベントが起きる前に、発生の予測をし、予防し、削減していくことは不可能となります。ナウトの独自の技術をご利用になりたい方は、こちらからお問い合わせください。


